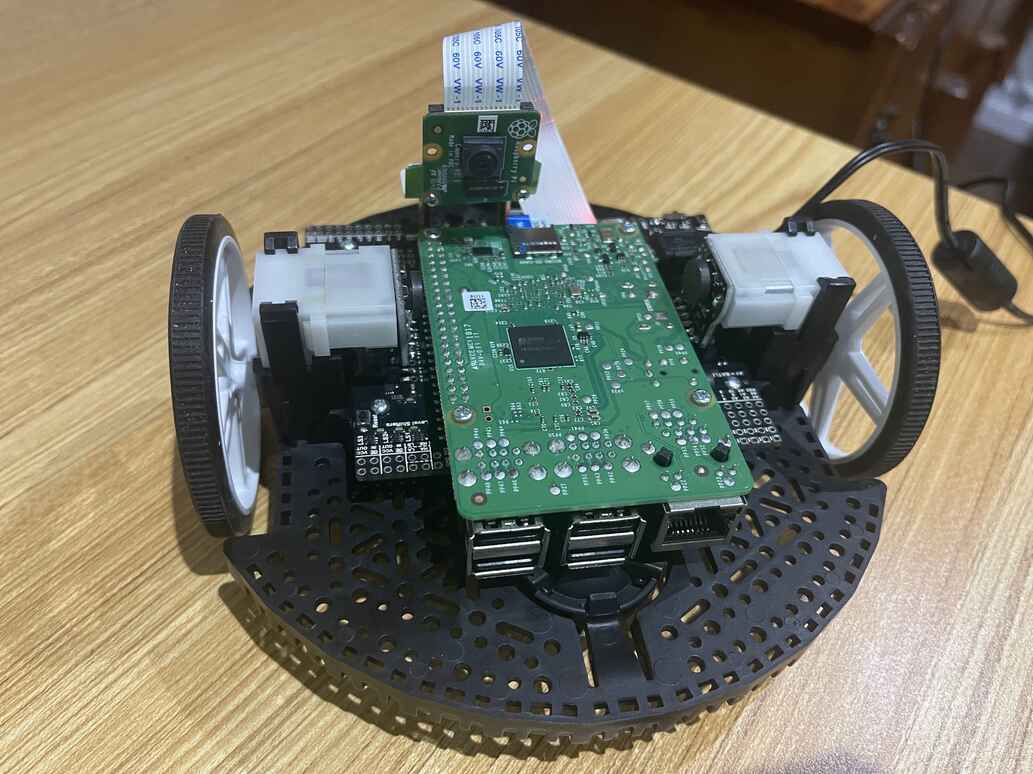
I’m building a Pololu Romi + Raspberry Pi that will do… I’m not quite sure what, yet.
This is one of many kits owned by a FIRST Robotics team in Canada, donated generously by a U.S. robotics company. This page will likely serve as some basic guidance (alongside the existing online documentation) and some lessons learned about the process. We’re going to try to do some basic vision work with the Raspberry Pi camera.
Hardware
The hardware can be separated into three distinct groups:
- The chassis and electrical/mechanical components (motors, encoders, batteries)
- The Control Board
- The Raspberry Pi
Capabilities
Once assembled, the Romi Control Board has:
- 2 Motors with encoders
- 1 Raspberry Pi Camera V2
- 1 Accelerometer
- 3 Programmable Buttons
- 3 Programmable LEDs
Assembly
While assembly can be fairly intuitive, the Pololu Romi Chassis User’s Guide is a great resource for verifying any assumptions being made. Be careful about where the instructions describe a differing options depending on what hardware you’re mounting. In this case, we’re mounting the Romi 32U4 Control Board, which changes some steps:
- you do not need to jumper the two sets of AA batteries, the control board has slots for both and handles the serialization of voltage for you
- The Raspberry Pi (Model 3 B) will mount directly to this board via the GPIO cluster of pins
Soldering
!> Before you solder anything, dry fit everything to make sure you have the right idea
As you solder each section, use a multimeter to verify you haven’t shorted any of the pins to each other. Be sure to follow soldering best practices regarding temperature and methods. Dry joints on a small mobile robot will eventually wiggle loose and you’ll get a very frustrating kind of problem to debug: randomly occurring, intermittent issues.
There are 5 groups of things to solder:
- The 6-pin socket connector strips for the wheel encoder/power supplies (
- note there are two sets of holes, you want the one closest to the wheels
- The L-shaped 6-pin male jumpers into the encoders
- be sure you dry-fit these first, there’s many ways do orient them wrongly
- the black frame must be flush with the encoder board
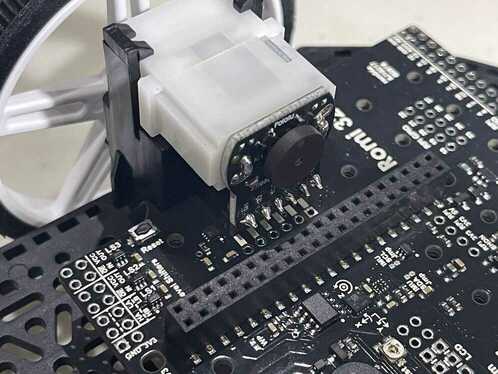
- The power pins between the motors and the encoder board
- be especially careful not to apply too much heat for too long as this can warp the brushes in the motor
- The buzzer in the middle of the board
- make sure to orient this properly, but it’s easy given the outline shape of the buzzer is printed on the board
- The four battery pins that connect the battery leads/springs to the board
- in order to remove the board later, you can squish the springs through the holes and pull them up with the board
- the battery leads will be delicate when removed from the frame, so be careful
Images
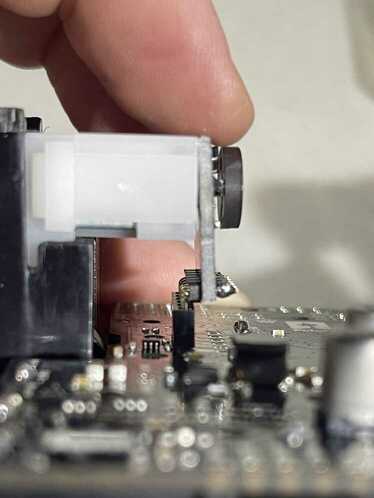
?> You might think the pins and stand-off for the motor encoder/power source are not plumb with the board. You’re correct. This is part my lack of a steady hand, and part because it seems to just work out this way. I saw a few images of people mounting the pins outwards in the other set of holes, but I opted to go with the examples shown in all of the Pololu tutorials and photos.
Software
Software is broken up into two categories: everything that runs on the Raspberry Pi, and the code flashed to the Control Board. The Raspberry Pi will be doing almost all the work, given it is a far more powerful computer. The Control Board will be responsible for the execution of larger commands. For example, the Pi will tell the Control Board “turn left” and the board will translate that command into the required electrical operations that send electricity through the motors in the correct direction.
Raspberry Pi
Installing Raspberry Pi OS
The Raspberry Pi Imager makes this completely painless. It will:
- Download the desired OS (Raspberry Pi OS Lite 64-bit)
- Format and properly partition an SD Card then install the above OS
- Allow you to set things such as the Wifi credentials, the local hostname for the device, and an ssh password.
When using the Imager, make sure you use:
- Pi OS Lite 32-bit
- Set the hostname (eg.
minibot) - Set the Wifi Credentials
- Set a username and password
?> You MUST use the 32-bit version of Pi OS (other OSes might work, but they must be 32 bit). This can make some operations a bit slower, but there are currently no 64-bit drivers for the Pi Camera 2 that I could find.
You’ll pick the SD card that you’ve plugged into the computer. It might suggest it is completely wiping one or more partitions on this card. That’s fine.
Once the imaging is complete, you can remove the card and plug it into the Raspberry Pi. Note that when you boot up the Pi for the first time, it can take 5-10 minutes before it responds to ping or ssh.
Connecting to the Raspberry Pi
If you set the hostname and Wifi credentials correctly, you can address it on the same network with:
ping pihostname.local (where you replace pihostname with the hostname you picked)
?> ping is a command that sends a tiny packet of data over the network that requests a tiny responds. It’s a way to way “hello!” and prove that your two computers can communicate.
Once that works, you can ssh to the robot using:
ssh username@hostname.local
It will ask a few security-related questions which you can say yes to. It will then ask for a password.
Installing OpenCV
You now need to set up a few things to get the Camera working and OpenCV Installed.
sudo raspi-config # Go to "Interface Options" and enable "Legacy Camera". You'll have to reboot after.
sudo apt update # Update the list of available software to make sure you download the latest versions.
sudo apt install python3-opencv # Install OpenCV for Python 3.
You can test that OpenCV installed properly and can access the camera with python3:
import cv2 # Import the library.
cap = cv2.VideoCapture(0) # Open `/dev/video0` as a capture device.
result, image = cap.read() # Capture an image and return two values:
# `result` is a boolean that will be `True` if image captured.
# `image` will be an object of image data.
image.size # This will be the size of image in bytes. If it's zero, something is wrong.
Installing Rust
Generally, follow the instructions found here: https://www.rust-lang.org/tools/install
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
Installing Other Dependencies
Note that I’m just globally installing Python dependencies rather than setting up a workspace/virtualenv. It’s fine for this case because we’re just hacking and learning.
?> You don’t necessarily need everything listed here, but it won’t hurt if you install everything.
# Git (for working with git repositories) and pip for installing Python dependencies.
sudo apt install git python3-pip
# Python dependencies we often use for vision and web hosting.
sudo pip install imutils Flask
# Dependencies for Rust development using OpenCV
sudo apt install libopencv-dev clang libclang-dev
Romi 32U4 (Arduino-like) Control Board
Arduino Follower (Slave) Library.
?> Historically we call things in software/hardware a “slave” because they are designed to simply follow orders from a “master”. Some might find it more modern to describe them as a “follower.”
In this case, the follower library is designed to expose all of the Romi 32U4 (an Arduino-compatible board) capabilities via I2C. This allows the attached Raspberry Pi to do all the work (ie. it’s the “master” or “leader”). The Pi will tell it to do things, and the 32U4 will handle the low-level details of doing them.
The library is found here: https://github.com/pololu/pololu-rpi-slave-arduino-library .
Reference Library
I have maintained a GitHub repository of code I wrote for this project. Note that it is not designed to be plug-and-play, so you might have to tinker a bit. But it’s probably a helpful reference:
https://github.com/ablakey/minibot
Links
Development Notes
General Architecture
I am aiming for:
- a Python-based OpenCV pipeline to read the camera, identify some object, and return:
- a streamable camera feed, ideal for web consumption (be wary of resolution, framerate, compression)
- metadata about the identified object, such as presence, type, size, position in frame
- a Rust-based WebSocket server that provides information about the robot (CPU and RAM usage, sensor data, motor encoder data, etc.)
- also accepts commands from the client for driving the robot or changing runtime settings
Rust and OpenCV
I couldn’t get Rust to compile properly when trying to use OpenCV. After 10 minutes it would panic. I tried cross-compiling, but the external dependency created a mess of things. I’ll probably stick with using Python for the OpenCV components, and Rust for the rest.
FAQ
How is the Raspberry Pi powered?
The Raspberry Pi is powered by the GPIO pins at the top end of the cluster. They supply VCC (5V) and ground from the Control Board.
Note that there is no power regulation or safety circuits, so these pins MUST be supplying 5V, which the Control Board does guarantee.
Can I power the robot from both the batteries and the 5V USB cable?
I’m not sure how safe it is. But I’ve often powered the Raspberry Pi from USB while the robot itself is turned off.
The HDMI port is blocked by a motor. How do I use it?
You can partially disassemble the robot, but think about what that means: any time you want a screen, you need to muck with your hardware. A better option is to try to never require a screen. This can be accomplished by setting up Wifi and network settings when installing the OS via the Raspberry Pi Imager. This way you can just ssh to the robot’s computer from a PC on your network.
How do I develop on the Raspberry Pi?
Raspberry Pis are comparatively slow. Very slow. You’re best off doing as much development as possible elsewhere, and then running it on your Pi for compatibility and performance testing. This isn’t always possible, however, as you might be doing work that requires the capabilities of the Pi, such as the camera, or the robot it is attached to. For managing code (that should all be in a repository such as GitHub!) you can just clone your code directly. For editing code in a quicker development cycle, check out a tool such as the Remote Development plugin for VSCode.
Why is Rust used in this project?
I hummed and hawed over this for a while. The best introduction would be Python or Java (because it’s already in-use by FIRST robotics programmers). But I thought this was an opportunity to dip our toes into the Rust world, given that opens up a lot of new horizons and gives young programmers some familiarity with the language.